Тут же я окремо виніс таке важливе практичне питання, як підключення індуктивних датчиків із транзисторним виходом, які у сучасному промисловому обладнанні повсюдно. Крім того, наведено реальні інструкції до датчиків та посилання на приклади.
Принцип активації (роботи) датчиків при цьому може бути будь-яким – індуктивні (наближення), оптичні (фотоелектричні) тощо.
У першій частині було описано можливі варіанти виходів датчиків. При підключенні датчиків з контактами (релейний вихід) проблем виникнути не повинно. А щодо транзисторних і з підключенням до контролера не все так просто.
Схеми підключення датчиків PNP та NPN
Відмінність PNP та NPN датчиків у тому, що вони комутують різні полюси джерела живлення. PNP (від слова "Positive") комутує позитивний вихід джерела живлення, NPN - негативний.
Нижче для прикладу наведені схеми підключення датчиків з транзисторним виходом. Навантаження - як правило, це вхід контролера.
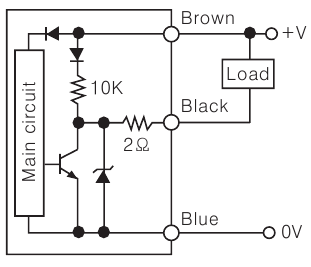
Датчик. Навантаження (Load) постійно підключено до "мінусу" (0V), подача дискретної "1" (+V) комутується транзистором. АЛЕ або НЗ датчик – залежить від схеми керування (Main circuit)
Датчик. Навантаження (Load) постійно підключено до "плюсу" (+V). Тут активний рівень (дискретний “1”) на виході датчика – низький (0V), при цьому на навантаження подається живлення через транзистор, що відкрився.
Закликаю всіх не плутатися, роботу цих схем буде детально розписано далі.
На схемах нижче показано в принципі те саме. Акцент приділено на відмінності у схемах PNP та NPN виходів.

Схеми підключення NPN та PNP виходів датчиків
На лівому малюнку – датчик із вихідним транзистором NPN. Комутується загальний провід, який у разі – негативний провід джерела питания.
Справа – випадок із транзистором PNPна виході. Цей випадок – найчастіший, тому що в сучасній електроніці прийнято негативний провід джерела живлення робити загальним, а входи контролерів та інших пристроїв, що реєструють, активувати позитивним потенціалом.
Як перевірити індуктивний датчик?
Для цього потрібно подати на нього харчування, тобто підключити його до схеми. Потім активувати (ініціювати) його. Під час активації світиться індикатор. Але індикація не гарантує правильну роботу індуктивного датчика. Потрібно підключити навантаження і виміряти напругу на ньому, щоб бути впевненим на 100%.
Заміна датчиків
Як я вже писав, є принципово 4 види датчиків з транзисторним виходом, які поділяються за внутрішнім пристроєм і схемою включення:
- PNP NO
- PNP NC
- NPN NO
- NPN NC
Усі ці типи датчиків можна замінити друг на друга, тобто. вони взаємозамінні.
Це реалізується такими способами:
- Переробка пристрою ініціації – механічно змінюється конструкція.
- Зміна схеми включення датчика.
- Перемикання типу виходу датчика (якщо такі перемикачі на корпусі датчика).
- Перепрограмування програми – зміна активного рівня входу, зміна алгоритму програми.
Нижче наведено приклад, як можна замінити датчик PNP на NPN, змінивши схему підключення:

PNP-NPN схеми взаємозамінності. Зліва – вихідна схема, справа – перероблена.
Зрозуміти роботу цих схем допоможе усвідомлення факту, що транзистор – це ключовий елемент, який можна уявити звичайними контактами реле (приклади – нижче, в позначеннях).
Отже, схема зліва. Припустимо, що тип датчика – АЛЕ. Тоді (незалежно від типу транзистора на виході), коли датчик не активний, його вихідні контакти розімкнуті, і струм через них не протікає. Коли датчик активний, контакти замкнуті, з усіма наслідками. Точніше, з струмом, що протікає через ці контакти)). Текучий струм створює падіння напруги на навантаженні.
Внутрішнє навантаження показане пунктиром недарма. Цей резистор існує, але його наявність не гарантує стабільної роботи датчика, датчик повинен бути підключений до входу контролера або іншого навантаження. Опір цього входу є основним навантаженням.
Якщо внутрішнього навантаження в датчику немає, і колектор “висить у повітрі”, це називають “схема з відкритим колектором”. Ця схема працює ТІЛЬКИ з підключеним навантаженням.
Так ось, у схемі з PNP виходом при активації напруга (+V) через відкритий транзистор надходить на вхід контролера і він активізується. Як того ж досягти з виходом NPN?
Бувають ситуації, коли потрібного датчика немає під рукою, а верстат повинен працювати прямо щас.
Дивимося на зміни у схемі праворуч. Насамперед, забезпечено режим роботи вихідного транзистора датчика. Для цього до схеми додано додатковий резистор, його опір зазвичай порядку 5,1 - 10 кОм. Тепер, коли датчик не активний, через додатковий резистор напруга (+V) надходить на вхід контролера і вхід контролера активізується. Коли датчик активний – на вході контролера дискретний “0”, оскільки вхід контролера шунтується відкритим NPN транзистором, майже весь струм додаткового резистора проходить через цей транзистор.
У разі відбувається перефазування роботи датчика. Натомість датчик працює у режимі, і контролер отримує інформацію. Найчастіше цього достатньо. Наприклад, у режимі підрахунку імпульсів – тахометр, чи кількість заготовок.
Так, не зовсім те, що ми хотіли, і схеми взаємозамінності npn та pnp датчиків не завжди прийнятні.
Як досягти повного функціоналу? Метод 1 – механічно зрушити чи переробити металеву пластинку (активатор). Або світловий проміжок, якщо йдеться про оптичний датчик. Спосіб 2 - перепрограмувати вхід контролера щоб дискретний "0" був активним станом контролера, а "1" - пасивним. Якщо під рукою є ноутбук, то другий спосіб і швидше, і простіше.
Умовне позначення датчика наближення
На важливих схемах індуктивні датчики (датчики наближення) позначають по-різному. Але головне – є квадрат, повернутий на 45° і дві вертикальні лінії в ньому. Як на схемах, зображених нижче.

АЛЕ НЗ датчики. Принципові схеми.
На верхній схемі – нормально відкритий (АЛЕ) контакт (умовно позначений транзистор PNP). Друга схема – нормально закрита, і третя схема – обидва контакти в одному корпусі.
Колірне маркування висновків датчиків
Існує стандартна система маркування датчиків. Усі виробники нині дотримуються її.
Однак, не зайве перед монтажем переконатися у правильності підключення, звернувшись до посібника (інструкції) щодо підключення. Крім того, зазвичай, кольори проводів вказані на самому датчику, якщо дозволяє його розмір.
Ось це маркування.
- Синій (Blue) - Мінус харчування
- Коричневий (Brown) – Плюс
- Чорний (Black) – Вихід
- Білий (White) – другий вихід, або вхід керування,треба дивитися інструкцію.
Система позначень індуктивних датчиків
Тип датчика позначається цифро-літерним кодом, в якому зашифровано основні параметри датчика. Нижче наведено систему маркування популярних датчиків Autonics.

Завантажити інструкції та посібники на деякі типи індуктивних датчиків:я зустрічаю у своїй роботі.
Всім дякую за увагу, чекаю питань щодо підключення датчиків у коментарях!
Дискретні датчики
Такий алгоритм дозволяє уникнути удару при змиканні прессформы, інакше її можна розколоти на дрібні шматочки. Така ж зміна швидкості відбувається і при відкритті прессформи. Тут уже двома контактними датчиками не обійтись.
Застосування аналогових датчиків
Малюнок 2. Місток Уітстона
Підключення аналогових датчиків

Вихідні сигнали аналогових датчиків


Але єдиним датчиком справа, як правило, не обходиться. Одними з найпопулярніших вимірів є вимірювання температури і тиску. Кількість таких точок на сучасних виробництвах може сягати кількох десятків тисяч. Відповідно і кількість датчиків також велика. Тому до одного контролера найчастіше підключається відразу кілька аналогових датчиків. Звичайно ж, не одразу кілька тисяч, добре, якщо десяток – інший. Таке підключення показано малюнку 7.

Рисунок 7. Підключення кількох аналогових датчиків до контролера
На цьому малюнку показано, як із струмового сигналу виходить напруга, придатна для перетворення на цифровий код. Якщо таких сигналів кілька, то обробляються вони все відразу, а поділяються за часом, мультиплексуються, інакше кожен канал довелося б ставити окремий АЦП.
З цією метою контролер має схему комутації каналів. Функціональна схема комутатора показано малюнку 8.

Рисунок 8. Комутатор каналів аналогових датчиків (картинка клікабельна)
Сигнали струмової петлі, перетворені на напругу на вимірювальному резистори (UR1…URn) надходять на вхід аналогового комутатора. Керуючі сигнали почергово пропускають на вихід один із сигналів UR1…URn, які посилюються підсилювачем, та по черзі надходять на вхід АЦП. Перетворена на цифровий код напруга надходить у контролер.
Схема, звісно, дуже спрощена, але принцип мультиплексування у ній розглянути цілком можливо. Приблизно так побудовано модуль введення аналогових сигналів контролерів МСТС (мікропроцесорна система технічних засобів), що випускалися смоленським ПК «Пролог».
Випуск таких контролерів давно вже припинено, хоча в деяких місцях, далеко не найкращих, ці контролери служать і досі. На зміну цим музейним експонатам приходять контролери нових моделей, переважно імпортного (китайського) виробництва.
Якщо контролер змонтований у металевій шафі, то оплетки, що екранують, рекомендується підключати до точки заземлення шафи. Довжина сполучних ліній може досягати двох з лишком кілометрів, що розраховується за відповідними формулами. Рахувати тут нічого не будемо, але повірте, що це так.
Нові датчики, нові контролери
З приходом нових контролерів з'явилися й нові аналогові датчики, що працюють за протоколом HART (Highway Addressable Remote Transducer), що перекладається як «Вимірювальний перетворювач, який дистанційно адресується через магістраль».
Вихідний сигнал датчика (польового пристрою) є аналоговим струмовим сигналом діапазону 4...20мА, на який накладається частотно модульований (FSK - Frequency Shift Keying) сигнал цифрового зв'язку.
Відомо, що середнє значення синусоїдального сигналу дорівнює нулю, тому на вихідний струм датчика 4 ... 20мА передача цифрової інформації впливу не надає. Такий режим використовується для настроювання датчиків.
Зв'язок протоколу HART здійснюється двома способами. У першому випадку, стандартному, двопровідної лінії можуть обмінюватися інформацією тільки два пристрої, при цьому вихідний аналоговий сигнал 4...20мА залежить від вимірюваної величини. Такий режим застосовується для настроювання польових пристроїв (датчиків).
У другому випадку до двопровідної лінії може бути підключено до 15 датчиків, кількість яких визначається параметрами лінії зв'язку та потужністю блоку живлення. Це режим багатоточкового зв'язку. У цьому режимі кожен датчик має свою адресу в діапазоні 1 ... 15, яким до нього звертається пристрій управління.
Датчик з адресою 0 від лінії зв'язку вимкнено. Обмін даними між датчиком та пристроєм керування в багатоточковому режимі здійснюється лише частотним сигналом. Струменевий сигнал датчика зафіксований на необхідному рівні і не змінюється.
Під даними у разі багатоточкового зв'язку маються на увазі не тільки результати вимірювань контрольованого параметра, але ще й цілий набір всілякої службової інформації.
Насамперед це адреси датчиків, команди управління, параметри налаштування. І вся ця інформація передається двопровідними лініями зв'язку. А чи не можна позбутися і їх? Щоправда, робити це треба обережно, лише у тих випадках, коли бездротове з'єднання не зможе вплинути на безпеку контрольованого процесу.
Ось такі технології прийшли на зміну старій аналоговій струмовій петлі. Але вона свої позиції не здає, широко застосовується скрізь, де це можливо.
У процесі автоматизації технологічних процесів управління механізмами і агрегатами доводиться зіштовхуватися з вимірами різних фізичних величин. Це може бути температура, тиск і витрата рідини або газу, частота обертання, сила світла інформація про положення частин механізмів та багато іншого. Ця інформація виходить за допомогою датчиків. Ось, спочатку про стан частин механізмів.
Дискретні датчики
Найпростіший датчик – звичайний механічний контакт: двері відчинили – контакт розімкнувся, зачинили – замкнувся. Такий нехитрий датчик, як і наведений алгоритм роботи, часто застосовується в охоронних сигналізаціях. Для механізму з поступальним рухом, який має два положення, наприклад, водопровідна засувка, знадобиться вже два контакти: замкнувся один контакт - засувка закрита, замкнувся інший - закрита.
Більш складний алгоритм поступального руху має механізм закриття пресформ термопласт автомата. Спочатку прессформа відкрита, це вихідне становище. У цьому положенні з форми витягуються готові вироби. Далі робітник закриває захисну огорожу і прессформа починає закриватися, починається новий робочий цикл.
Відстань між половинами прессформи досить велика. Тому спочатку прессформа рухається швидко, але в деякій відстані до змикання половин, спрацьовує кінцевик, швидкість руху значно зменшується і прессформа плавно закривається.
Таким чином, датчики на основі контакту є дискретними або бінарними, мають два положення, замкнуті - розімкнуті або 1 і 0. Іншими словами можна сказати, що подія відбулася чи ні. У наведеному вище прикладі контактами «уловлюються» кілька точок: початок руху, точка зниження швидкості, кінець руху.
У геометрії точка не має жодних розмірів, просто точка і все. Вона може бути (на аркуші паперу, в траєкторії руху, як у нашому випадку) або її просто немає. Тому виявлення крапок застосовуються саме дискретні датчики. Може бути порівняння з точкою тут не дуже доречно, адже в практичних цілях користуються величиною точності спрацьовування дискретного датчика, а ця точність набагато більше геометричної точки.
Але сам собою механічний контакт річ ненадійна. Тому скрізь, де це можливо, механічні контакти замінюються на безконтактні датчики. Найпростіший варіант це геркони: магніт наблизився, контакт замкнувся. Точність спрацьовування геркона залишає бажати кращого, застосовувати такі датчики тільки для визначення положення дверей.
Більш складним і точним варіантом можна вважати різні безконтактні датчики. Якщо металевий прапорець увійшов у проріз, датчик спрацював. Як приклад таких датчиків можна навести датчики БВК (Безконтактний Вимикач Кінцевий) різних серій. Точність спрацьовування (диференціал ходу) таких датчиків 3 міліметри.
Датчик серії БВК
Малюнок 1. Датчик серії БВК
Напруга живлення датчиків БВК 24В, струм навантаження 200мА, що цілком достатньо для підключення реле проміжних для подальшого узгодження зі схемою управління. Саме так використовуються датчики БВК у різному устаткуванні.
Крім датчиків БВК застосовуються також датчики типів БТП, КВП, ПІП, КВД, ЇЖ. Кожна серія має кілька типів датчиків, що позначаються цифрами, наприклад БТП-101, БТП-102, БТП-103, БТП-211.
Всі згадані датчики є безконтактними дискретними, їх основне призначення – визначення положення частин механізмів і агрегатів. Звичайно, цих датчиків набагато більше, про всіх в одній статті не написати. Ще поширені і досі знаходять широке застосування різні контактні датчики.
Застосування аналогових датчиків
Крім дискретних датчиків у системах автоматизації, широке застосування знаходять аналогові датчики. Їх призначення - отримання інформації про різні фізичні величини, причому не просто так взагалі, а в реальному масштабі часу. Точніше перетворення фізичної величини (тиск, температура, освітленість, витрата, напруга, струм) електричний сигнал придатний передачі по лініях зв'язку в контролер і його обробка.
Аналогові датчики розташовуються, як правило, досить далеко від контролера, через що часто їх називають польовими пристроями. Цей термін часто застосовується у технічній літературі.
Аналоговий датчик зазвичай складається з декількох частин. Найголовніша частина це чутливий елемент – сенсор. Його призначення перевести вимірювану величину електричний сигнал. Але сигнал, який отримується від сенсора, як правило, невеликий. Для отримання сигналу, придатного для посилення, сенсор найчастіше включається до мостової схеми - містка Уітстона.
Місток Уітстона
Малюнок 2. Місток Уітстона
Початкове призначення бруківки - точне вимірювання опору. До діагоналі моста AD підключається джерело постійного струму. В іншу діагональ підключений чутливий гальванометр із середньою точкою, з нулем у середині шкали. Для вимірювання опору резистора Rx обертанням підстроювального резистора R2 слід досягти рівноваги моста, встановити стрілку гальванометра на нульове значення.
Відхилення стрілки приладу в той чи інший бік дозволяє визначити напрямок обертання резистора R2. Розмір вимірюваного опору визначається за шкалою, поєднаною з ручкою резистора R2. Умовою рівноваги моста є рівність співвідношень R1/R2 та Rx/R3. У цьому випадку між точками BC виходить нульова різниця потенціалів і струм через гальванометр V не протікає.
Опір резисторів R1 і R3 підібрано дуже точно, їх розкид повинен бути мінімальним. Тільки в цьому випадку навіть невеликий розбаланс моста викликає досить помітну зміну напруги діагоналі BC. Саме це властивість моста використовується для підключення чутливих елементів (сенсорів) різних аналогових датчиків. Ну а далі все просто, справа техніки.
Для використання сигналу, отриманого з сенсора, потрібна його подальша обробка - посилення та перетворення у вихідний сигнал, придатний для передачі та обробки схемою управління - контролером. Найчастіше вихідним сигналом аналогових датчиків є струм (аналогова струмова петля), рідше напруга.
Чому саме струм? Справа в тому, що вихідні каскади аналогових датчиків побудовані на основі джерел струму. Це дозволяє позбутися впливу вихідний сигнал опору сполучних ліній, користуватися сполучними лініями великої довжини.
Подальше перетворення досить просто. Струмовий сигнал перетворюється на напругу, для чого достатньо струм пропустити через резистор відомого опору. Падіння напруги на вимірювальному резистори виходить за законом Ома U=I*R.
Наприклад, для струму 10 мА на резисторі опором 100Ом вийде напруга 10 * 100 = 1000мВ, аж цілий 1 вольт! При цьому вихідний струм датчика залежить від опору з'єднувальних проводів. У розумних, звісно, межах.
Підключення аналогових датчиків
Отримане на вимірювальному резисторі напруга легко перетворити на цифровий вигляд, придатний для введення в контролер. Перетворення виконується за допомогою аналого-цифрових перетворювачів АЦП.
Цифрові дані контролер передаються послідовним або паралельним кодом. Усі залежить від конкретної схеми включення. Спрощена схема підключення аналогового датчика показано малюнку 3.
Підключення аналогового датчика
Рисунок 3. Підключення аналогового датчика (щоб збільшити натисніть на картинку)
До контролера підключаються виконавчі механізми, або сам контролер підключається до комп'ютера, що входить у систему автоматизації.
Природно, аналогові датчики мають закінчену конструкцію, одним з елементів якої є корпус з приєднувальними елементами. Як приклад на малюнку 4 показаний зовнішній вигляд датчика надлишкового тиску типу Зонд-10.
Датчик надлишкового тиску Зонд-10
Малюнок 4. Датчик надлишкового тиску Зонд-10
У нижній частині датчика можна бачити приєднувальне різьблення для підключення до трубопроводу, а праворуч під чорною кришкою знаходиться роз'єм для підключення лінії зв'язку з контролером.
Герметизація різьбового з'єднання проводиться за допомогою шайби з відпаленої міді (входить у комплект поставки датчика), а аж ніяк не підмотуванням з фум-стрічки або льону. Робиться це для того, щоб при встановленні датчика не деформувати розташований всередині сенсорний елемент.
Вихідні сигнали аналогових датчиків
Відповідно до стандартів існує три діапазони струмових сигналів: 0…5мА, 0…20мА та 4…20мА. У чому їхня відмінність, і які особливості?
Найчастіше залежність вихідного струму прямо пропорційна вимірюваній величині, наприклад, чим вищий тиск у трубі, тим більше струм на виході датчика. Хоча інколи застосовується інверсне включення: більшій величині вихідного струму відповідає мінімальне значення вимірюваної величини на виході датчика. Все залежить від типу контролера. Деякі датчики навіть мають перемикання з прямого на інверсний сигнал.
Вихідний сигнал діапазону 0…5мА дуже малий, і тому схильний до дії перешкод. Якщо сигнал такого датчика коливається при незмінному значенні параметра, що вимірювається, тобто рекомендації паралельно виходу датчика встановити конденсатор ємністю 0.1 ... 1мкФ. Більш стійким є струмовий сигнал діапазоні 0…20мА.
Але обидва цих діапазону погані тим, що нуль на початку шкали не дозволяє однозначно визначити, що сталося. Чи вимірюваний сигнал насправді прийняв нульовий рівень, що, в принципі, можливо, чи просто обірвалася лінія зв'язку? Тому від використання цих діапазонів намагаються по можливості відмовитися.
Більш надійним вважається сигнал аналогових датчиків із вихідним струмом у діапазоні 4…20мА. Перешкодно захищеність його досить висока, а нижня межа, навіть якщо вимірюваний сигнал має нульовий рівень, буде 4мА, що дозволяє говорити про те, що лінія зв'язку не обірвана.
Ще однією гарною особливістю діапазону 4 ... 20мА є те, що датчики можна підключати всього по двох дротах, оскільки саме таким струмом живиться сам датчик. Це його струм споживання та одночасно вимірювальний сигнал.
Джерело живлення датчиків діапазону 4-20мА включається, як показано на малюнку 5. При цьому датчики Зонд-10, як і багато інших, за паспортом мають широкий діапазон напруги живлення 10-38В, хоча найчастіше застосовуються стабілізовані джерела з напругою 24В.
Підключення аналогового датчика із зовнішнім джерелом живлення
Рисунок 5. Підключення аналогового датчика із зовнішнім джерелом живлення
На цій схемі присутні такі елементи та позначення. Rш - резистор вимірювального шунта, Rл1 та Rл2 - опору ліній зв'язку. Для підвищення точності вимірювання як Rш повинен використовуватися прецизійний вимірювальний резистор. Проходження струму джерела живлення показано стрілками.
Неважко бачити, що вихідний струм джерела живлення проходить з клеми +24В, через лінію R1 досягає клеми датчика +AO2, проходить через датчик і через вихідний контакт датчика - AO2, сполучну лінію Rл2, резистор Rш повертається на клему джерела живлення -24В. Все, ланцюг замкнувся, струм тече.
У випадку, якщо контролер містить джерело живлення 24В, підключення датчика або вимірювального перетворювача можливе за схемою, показаною на малюнку 6.
Підключення аналогового датчика до контролера з внутрішнім джерелом живлення
Рисунок 6. Підключення аналогового датчика до контролера з внутрішнім джерелом живлення
На цій схемі показаний ще один елемент - баластний резистор Rб. Його призначення - захист вимірювального резистора при замиканні лінії зв'язку або несправності аналогового датчика. Установка резистора Rб необов'язкова, хоч і бажана.
Крім різних датчиків, струмовий вихід мають також вимірювальні перетворювачі, які в системах автоматизації використовуються досить часто.
Вимірювальний перетворювач - пристрій для перетворення рівнів напруги, наприклад, 220В або струму кілька десятків або сотень ампер в струмовий сигнал 4 ... 20мА. Тут просто відбувається перетворення рівня електричного сигналу, а чи не уявлення деякої фізичної величини (швидкість, витрата, тиск) в електричному вигляді.
Але єдиним датчиком справа, як правило, не обходиться. Одними з найпопулярніших вимірів є вимірювання температури і тиску. Кількість таких точок на сучасних виробництвах може досягати кількох десятків.
Читати так само
- Види настінних світильників та особливості їх використання
- Про різницю потенціалів, електрорушійну силу та напругу
- Що можна визначити за лічильником, крім витрати електроенергії
- Про критерії оцінки якості електротехнічної продукції
- Що краще для приватного будинку - однофазне або трифазне введення?
- Як вибрати стабілізатор напруги для заміського будинку
- Ефект Пельтьє: магічна дія електричного струму
- Практика розведення та підключення ТБ кабелю в квартирі – особливості процесу
- Проблеми в електропроводці: що робити і як їх усунути?
- Люмінесцентні лампи Т5: перспективи та проблеми застосування
- Висувні блоки розеток: практика використання та підключення
- Електронні підсилювачі Частина 2. Підсилювачі звукових частот
- Правильна експлуатація електрообладнання та електропроводки у заміському будинку
- Основні моменти використання безпечної напруги у побуті
- Необхідні інструменти та прилади для початківців вивчати електроніку
- Конденсатори: призначення, будова, принцип дії
- Що таке перехідний контактний опір та як з ним боротися
- Реле напруги: які бувають, як вибрати та підключити?
- Що краще для приватного будинку - однофазне або трифазне введення?
- Конденсатори у електронних схемах. Частина 2. Міжкаскадний зв'язок, фільтри, генератори
- Як забезпечити комфорт при недостатній потужності електромережі
- Як переконатися при покупці автомата в магазині, що він справний?
- Як вибрати перетин дроту для мереж освітлення 12 вольт
- Спосіб підключення водонагрівача та насоса при недостатній потужності мережі
- Котушки індуктивності та магнітні поля. Частина 2. Електромагнітна індукція та індуктивність
- Операційні підсилювачі. Частина 2. Ідеальний операційний підсилювач
- Що таке мікроконтролери (призначення, пристрій, софт)
- Продовжуємо життя компактній люмінесцентній лампі (економці)
- Схеми включення операційних підсилювачів без зворотного зв'язку
- Заміна електричного розподільчого щитка квартири
- Чому не можна з'єднувати мідь та алюміній у електропроводці?
Дачі, що отримали найбільше поширення у сфері автоматизації виробництва, з уніфікованим струмовим виходом 4-20, 0-50 або 0-20 мА можуть мати різні схеми підключення до вторинних приладів. Сучасні датчики, що мають низьке енергоспоживання та струмовий вихід 4-20 мА, найчастіше підключають за двопровідною схемою. Тобто до такого датчика підключається всього один кабель з двома жилами, якими цей датчик запитується, і цим же двом жилам здійснюється передача .
Як правило, датчики з виходом 4-20 мА та двопровідною схемою підключення мають пасивний вихід і їм для роботи необхідне зовнішнє джерело живлення. Це джерело живлення може бути вбудоване безпосередньо у вторинний прилад (в його вхід) і при підключенні датчика до такого приладу сигнального ланцюга відразу з'являється струм. Про прилади, які мають вбудований у вхід джерело живлення для датчика, кажуть, що це прилади з активним входом.
Більшість сучасних вторинних приладів та контролерів мають вбудовані джерела живлення для роботи з датчиками з пасивними виходами.

Якщо ж вторинний прилад має пасивний вхід - по суті, просто резистор, з якого вимірювальна схема приладу "зчитує" падіння напруги, пропорційне струму, що протікає в ланцюгу, то для роботи датчика необхідний додатковий. Зовнішній блок живлення в цьому випадку включається послідовно з датчиком та вторинним приладом у розрив струмової петлі.

Вторинні прилади зазвичай проектуються та випускаються з таким розрахунком, щоб до них можна було підключити як двопровідні датчики 4-20 мА, так і датчики 0-5, 0-20 або 4-20 мА, що підключаються за трипровідною схемою. Для підключення двопровідного датчика до входу вторинного приладу з трьома вхідними клемами (+U, вхід та загальний) задіяні клеми "+U" та "вхід", клема "загальний" залишається вільною.

Так як датчики, як уже було сказано вище, можуть мати не тільки вихід 4-20 мА, а, наприклад, 0-5 або 0-20 мА або їх неможливо підключити за двопровідною схемою через велике власне енергоспоживання (більше 3 мА) , застосовують трипровідну схему підключення. У цьому випадку ланцюги живлення датчика та ланцюги вихідного сигналу розділені. Датчики, що мають трипровідну схему підключення, зазвичай мають активний вихід. Тобто, якщо подати на датчик з активним виходом напруга живлення і між його вихідними клемами "вихід" і "загальний" підключити опір навантаження, то у вихідний ланцюга побіжить струм, пропорційний величині вимірюваного параметра.

Вторинні прилади мають досить малопотужний вбудований блок живлення для запитки датчиків. Максимальний вихідний струм вбудованих блоків живлення зазвичай знаходиться в межах 22-50 мА, чого не завжди достатньо для живлення датчиків, що мають велике енергоспоживання: електромагнітних витратомірів, інфрачервоних газоаналізаторів і т.п. У цьому випадку для живлення трипровідного датчика доводиться використовувати зовнішній, потужніший блок живлення, що забезпечує необхідну потужність. Вбудований у вторинний пристрій джерело живлення при цьому не використовується.

Подібна схема включення трипровідних датчиків зазвичай використовується і в тому випадку, коли напруга вбудованого в прилад джерела живлення не відповідає напруги живлення, яке допускається подавати на цей датчик. Наприклад, вбудоване джерело живлення має вихідну напругу 24В, а датчик дозволяється живити напругою від 10 до 16В.
Деякі вторинні прилади можуть мати декілька вхідних каналів і потужний блок живлення для запиту зовнішніх датчиків. Необхідно пам'ятати, що сумарна споживана потужність всіх підключених до такого багатоканального приладу датчиків повинна бути меншою за потужність вбудованого джерела живлення, призначеного для їх живлення. Крім того, вивчаючи технічні характеристики приладу, необхідно чітко розрізняти призначення вбудованих в нього блоків (джерел) живлення. Один вбудований джерело використовується для живлення безпосередньо самого вторинного приладу – для роботи дисплея та індикаторів, вихідних реле, електронної схеми приладу тощо. Це джерело живлення може мати досить велику потужність. Друге вбудоване джерело використовується для запиту виключно вхідних ланцюгів – підключених до входів датчиків.
Перед підключенням датчика до вторинного приладу слід уважно вивчити посібники з експлуатації на дане обладнання, визначити типи входів та виходів (активний/пасивний), перевірити відповідність споживаної датчиком потужності та потужності джерела живлення (вбудованого або зовнішнього) і лише після цього проводити підключення. Реальні позначення вхідних та вихідних клем датчиків та приладів можуть відрізнятися від тих, що наведені вище. Так клеми "Вх(+)" і "Вх(-)" можуть мати позначення +J і -J, +4-20 та -4-20, +In та -In тощо. Клема "+U піт" може бути позначена як +V, Supply, +24V тощо, клема "Вихід" - Out, Sign, Jout, 4-20 mA і т.п., клема "загальний" - GND , -24V, 0V і т.п., але сенсу це не змінює.
Датчики з струмовим виходом мають чотирипровідну схему підключення мають аналогічну схему підключення, що і двопровідні датчики з тією різницею, що живлення чотирипровідних датчиків здійснюється по окремій парі проводів. Крім того, чотирипровідні датчики можуть мати як, що необхідно враховувати при виборі схеми підключення.
У процесі автоматизації технологічних процесів управління механізмами і агрегатами доводиться зіштовхуватися з вимірами різних фізичних величин. Це може бути температура, тиск і витрата рідини або газу, частота обертання, сила світла інформація про положення частин механізмів та багато іншого. Ця інформація виходить за допомогою датчиків. Ось, спочатку про стан частин механізмів.
Дискретні датчики
Найпростіший датчик – звичайний механічний контакт: двері відчинили – контакт розімкнувся, зачинили – замкнувся. Такий нехитрий датчик, як і наведений алгоритм роботи, часто . Для механізму з поступальним рухом, який має два положення, наприклад, водопровідна засувка, знадобиться вже два контакти: замкнувся один контакт - засувка закрита, замкнувся інший - закрита.
Більш складний алгоритм поступального руху має механізм закриття пресформ термопласт автомата. Спочатку прессформа відкрита, це вихідне становище. У цьому положенні з форми витягуються готові вироби. Далі робітник закриває захисну огорожу і прессформа починає закриватися, починається новий робочий цикл.
Відстань між половинами прессформи досить велика. Тому спочатку прессформа рухається швидко, але в деякій відстані до змикання половин, спрацьовує кінцевик, швидкість руху значно зменшується і прессформа плавно закривається.
Такий алгоритм дозволяє уникнути удару при змиканні прессформы, інакше її можна розколоти на дрібні шматочки. Така ж зміна швидкості відбувається і при відкритті прессформи. Тут уже двома контактними датчиками не обійтись.
Таким чином, датчики на основі контакту є дискретними або бінарними, мають два положення, замкнуті - розімкнуті або 1 і 0. Іншими словами можна сказати, що подія відбулася чи ні. У наведеному вище прикладі контактами «уловлюються» кілька точок: початок руху, точка зниження швидкості, кінець руху.
У геометрії точка не має жодних розмірів, просто точка і все. Вона може бути (на аркуші паперу, в траєкторії руху, як у нашому випадку) або її просто немає. Тому виявлення крапок застосовуються саме дискретні датчики. Може бути порівняння з точкою тут не дуже доречно, адже в практичних цілях користуються величиною точності спрацьовування дискретного датчика, а ця точність набагато більше геометричної точки.
Але сам собою механічний контакт річ ненадійна. Тому скрізь, де це можливо, механічні контакти замінюються на безконтактні датчики. Найпростіший варіант це геркони: магніт наблизився, контакт замкнувся. Точність спрацьовування геркона залишає бажати кращого, застосовувати такі датчики тільки для визначення положення дверей.
Більш складним і точним варіантом можна вважати різні безконтактні датчики. Якщо металевий прапорець увійшов у проріз, датчик спрацював. Як приклад таких датчиків можна навести датчики БВК (Безконтактний Вимикач Кінцевий) різних серій. Точність спрацьовування (диференціал ходу) таких датчиків 3 міліметри.

Малюнок 1. Датчик серії БВК
Напруга живлення датчиків БВК 24В, струм навантаження 200мА, що цілком достатньо для підключення реле проміжних для подальшого узгодження зі схемою управління. Саме так використовуються датчики БВК у різному устаткуванні.
Крім датчиків БВК застосовуються також датчики типів БТП, КВП, ПІП, КВД, ЇЖ. Кожна серія має кілька типів датчиків, що позначаються цифрами, наприклад БТП-101, БТП-102, БТП-103, БТП-211.
Всі згадані датчики є безконтактними дискретними, їх основне призначення – визначення положення частин механізмів і агрегатів. Звичайно, цих датчиків набагато більше, про всіх в одній статті не написати. Ще поширені і досі знаходять широке застосування різні контактні датчики.
Застосування аналогових датчиків
Крім дискретних датчиків у системах автоматизації, широке застосування знаходять аналогові датчики. Їх призначення - отримання інформації про різні фізичні величини, причому не просто так взагалі, а в реальному масштабі часу. Точніше перетворення фізичної величини (тиск, температура, освітленість, витрата, напруга, струм) електричний сигнал придатний передачі по лініях зв'язку в контролер і його обробка.
Аналогові датчики розташовуються, як правило, досить далеко від контролера, чому часто їх називають польовими пристроями. Цей термін часто застосовується у технічній літературі.
Аналоговий датчик зазвичай складається з декількох частин. Найголовніша частина це чутливий елемент - сенсор. Його призначення перевести вимірювану величину електричний сигнал. Але сигнал, який отримується від сенсора, як правило, невеликий. Для отримання сигналу, придатного для посилення, сенсор найчастіше включається в бруківку - місток Уітстона.

Малюнок 2. Місток Уітстона
Початкове призначення бруківки - точне вимірювання опору. До діагоналі моста AD підключається джерело постійного струму. В іншу діагональ підключений чутливий гальванометр із середньою точкою, з нулем у середині шкали. Для вимірювання опору резистора Rx обертанням підстроювального резистора R2 слід досягти рівноваги моста, встановити стрілку гальванометра на нульове значення.
Відхилення стрілки приладу в той чи інший бік дозволяє визначити напрямок обертання резистора R2. Розмір вимірюваного опору визначається за шкалою, поєднаною з ручкою резистора R2. Умовою рівноваги моста є рівність співвідношень R1/R2 та Rx/R3. У цьому випадку між точками BC виходить нульова різниця потенціалів і струм через гальванометр V не протікає.
Опір резисторів R1 і R3 підібрано дуже точно, їх розкид повинен бути мінімальним. Тільки в цьому випадку навіть невеликий розбаланс моста викликає досить помітну зміну напруги діагоналі BC. Саме це властивість моста використовується для підключення чутливих елементів (сенсорів) різних аналогових датчиків. Ну а далі все просто, справа техніки.
Для використання сигналу, отриманого з сенсора, потрібна його подальша обробка, - посилення та перетворення у вихідний сигнал, придатний для передачі та обробки схемою управління - контролером. Найчастіше вихідним сигналом аналогових датчиків є струм (аналогова струмова петля), рідше напруга.
Чому саме струм? Справа в тому, що вихідні каскади аналогових датчиків побудовані на основі джерел струму. Це дозволяє позбутися впливу вихідний сигнал опору сполучних ліній, користуватися сполучними лініями великої довжини.
Подальше перетворення досить просто. Струмовий сигнал перетворюється на напругу, для чого достатньо струм пропустити через резистор відомого опору. Падіння напруги на вимірювальному резистори виходить за законом Ома U=I*R.
Наприклад, для струму 10 мА на резисторі опором 100Ом вийде напруга 10 * 100 = 1000мВ, аж цілий 1 вольт! При цьому вихідний струм датчика залежить від опору з'єднувальних проводів. У розумних, звісно, межах.
Підключення аналогових датчиків
Отримане на вимірювальному резисторі напруга легко перетворити на цифровий вигляд, придатний для введення в контролер. Перетворення виконується за допомогою аналого-цифрових перетворювачів АЦП.
Цифрові дані контролер передаються послідовним або паралельним кодом. Усі залежить від конкретної схеми включення. Спрощена схема підключення аналогового датчика показано малюнку 3.
Рисунок 3. Підключення аналогового датчика (щоб збільшити натисніть на картинку)
До контролера підключаються виконавчі механізми, або сам контролер підключається до комп'ютера, що входить у систему автоматизації.
Природно, аналогові датчики мають закінчену конструкцію, одним з елементів якої є корпус з приєднувальними елементами. Як приклад на малюнку 4 показаний зовнішній вигляд датчика надлишкового тиску типу Зонд-10.

Малюнок 4. Датчик надлишкового тиску Зонд-10
У нижній частині датчика можна бачити приєднувальне різьблення для підключення до трубопроводу, а праворуч під чорною кришкою знаходиться роз'єм для підключення лінії зв'язку з контролером.
Герметизація різьбового з'єднання проводиться за допомогою шайби з відпаленої міді (входить у комплект поставки датчика), а аж ніяк не підмотуванням з фум-стрічки або льону. Робиться це для того, щоб при встановленні датчика не деформувати розташований всередині сенсорний елемент.
Вихідні сигнали аналогових датчиків
Відповідно до стандартів існує три діапазони струмових сигналів: 0…5мА, 0…20мА та 4…20мА. У чому їхня відмінність, і які особливості?
Найчастіше залежність вихідного струму прямо пропорційна вимірюваній величині, наприклад, чим вищий тиск у трубі, тим більше струм на виході датчика. Хоча інколи застосовується інверсне включення: більшій величині вихідного струму відповідає мінімальне значення вимірюваної величини на виході датчика. Все залежить від типу контролера. Деякі датчики навіть мають перемикання з прямого на інверсний сигнал.
Вихідний сигнал діапазону 0…5мА дуже малий, і тому схильний до дії перешкод. Якщо сигнал такого датчика коливається при незмінному значенні параметра, що вимірювається, тобто рекомендації паралельно виходу датчика встановити конденсатор ємністю 0.1 ... 1мкФ. Більш стійким є струмовий сигнал діапазоні 0…20мА.
Але обидва цих діапазону погані тим, що нуль на початку шкали не дозволяє однозначно визначити, що сталося. Чи вимірюваний сигнал насправді прийняв нульовий рівень, що, в принципі, можливо, чи просто обірвалася лінія зв'язку? Тому від використання цих діапазонів намагаються по можливості відмовитися.
Більш надійним вважається сигнал аналогових датчиків із вихідним струмом у діапазоні 4…20мА. Перешкодно захищеність його досить висока, а нижня межа, навіть якщо вимірюваний сигнал має нульовий рівень, буде 4мА, що дозволяє говорити про те, що лінія зв'язку не обірвана.
Ще однією гарною особливістю діапазону 4 ... 20мА є те, що датчики можна підключати всього по двох дротах, оскільки саме таким струмом живиться сам датчик. Це його струм споживання та одночасно вимірювальний сигнал.
Джерело живлення датчиків діапазону 4-20мА включається, як показано на малюнку 5. При цьому датчики Зонд-10, як і багато інших, за паспортом мають широкий діапазон напруги живлення 10-38В, хоча найчастіше застосовуються з напругою 24В.

Рисунок 5. Підключення аналогового датчика із зовнішнім джерелом живлення
На цій схемі присутні такі елементи та позначення. Rш - резистор вимірювального шунта, Rл1 та Rл2 - опору ліній зв'язку. Для підвищення точності вимірювання як Rш повинен використовуватися прецизійний вимірювальний резистор. Проходження струму джерела живлення показано стрілками.
Неважко бачити, що вихідний струм джерела живлення проходить з клеми +24В, через лінію R1 досягає клеми датчика +AO2, проходить через датчик і через вихідний контакт датчика - AO2, сполучну лінію Rл2, резистор Rш повертається на клему джерела живлення -24В. Все, ланцюг замкнувся, струм тече.
У випадку, якщо контролер містить джерело живлення 24В, підключення датчика або вимірювального перетворювача можливе за схемою, показаною на малюнку 6.

Рисунок 6. Підключення аналогового датчика до контролера з внутрішнім джерелом живлення
На цій схемі показаний ще один елемент - баластний резистор Rб. Його призначення - захист вимірювального резистора при замиканні лінії зв'язку або несправності аналогового датчика. Установка резистора Rб необов'язкова, хоч і бажана.
Крім різних датчиків, струмовий вихід мають також вимірювальні перетворювачі, які в системах автоматизації використовуються досить часто.
Вимірювальний перетворювач- пристрій для перетворення рівнів напруги, наприклад, 220В або струму кілька десятків або сотень ампер в струмовий сигнал 4 ... 20мА. Тут просто відбувається перетворення рівня електричного сигналу, а чи не уявлення деякої фізичної величини (швидкість, витрата, тиск) в електричному вигляді.
Але єдиним датчиком справа, як правило, не обходиться. Одними з найпопулярніших вимірів є вимірювання температури і тиску. Кількість таких точок на сучасних виробництвах може сягати кількох десятків тисяч. Відповідно і кількість датчиків також велика. Тому до одного контролера найчастіше підключається відразу кілька аналогових датчиків. Звичайно ж, не одразу кілька тисяч, добре, якщо десяток – інший. Таке підключення показано малюнку 7.

Рисунок 7. Підключення кількох аналогових датчиків до контролера
На цьому малюнку показано, як із струмового сигналу виходить напруга, придатна для перетворення на цифровий код. Якщо таких сигналів кілька, то обробляються вони все відразу, а поділяються за часом, мультиплексуються, інакше кожен канал довелося б ставити окремий АЦП.
З цією метою контролер має схему комутації каналів. Функціональна схема комутатора показано малюнку 8.

Рисунок 8. Комутатор каналів аналогових датчиків (картинка клікабельна)
Сигнали струмової петлі, перетворені на напругу на вимірювальному резистори (UR1…URn) надходять на вхід аналогового комутатора. Керуючі сигнали почергово пропускають на вихід один із сигналів UR1…URn, які посилюються підсилювачем, та по черзі надходять на вхід АЦП. Перетворена на цифровий код напруга надходить у контролер.
Схема, звісно, дуже спрощена, але принцип мультиплексування у ній розглянути цілком можливо. Приблизно так побудовано модуль введення аналогових сигналів контролерів МСТС (мікропроцесорна система технічних засобів), що випускалися смоленським ПК «Пролог». Зовнішній вигляд контролера МСТС показаний малюнку 9.

Малюнок 9. Контролер МСТС
Випуск таких контролерів давно вже припинено, хоча в деяких місцях, далеко не найкращих, ці контролери служать і досі. На зміну цим музейним експонатам приходять контролери нових моделей, переважно імпортного (китайського) виробництва.
Якщо контролер змонтований у металевій шафі, то оплетки, що екранують, рекомендується підключати до точки заземлення шафи. Довжина сполучних ліній може досягати двох з лишком кілометрів, що розраховується за відповідними формулами. Рахувати тут нічого не будемо, але повірте, що це так.
Нові датчики, нові контролери
З приходом нових контролерів з'явились і нові аналогові датчики, що працюють за протоколом HART(Highway Addressable Remote Transducer), що перекладається як «Вимірювальний перетворювач, що адресується дистанційно через магістраль».
Вихідний сигнал датчика (польового пристрою) є аналоговим струмовим сигналом діапазону 4...20мА, на який накладається частотно модульований (FSK - Frequency Shift Keying) сигнал цифрового зв'язку.

Рисунок 10. Вихідний сигнал аналогового датчика за протоколом HART
На малюнку показаний аналоговий сигнал, а навколо нього, як змія, звивається синусоїда. Це і є частотно-модульований сигнал. Але це ще зовсім не цифровий сигнал, його ще доведеться розпізнати. На малюнку помітно, що частота синусоїди під час передачі логічного нуля вище (2,2КГц), ніж за передачі одиниці (1,2КГц). Передача цих сигналів здійснюється струмом амплітудою ±0,5мА синусоїдальної форми.
Відомо, що середнє значення синусоїдального сигналу дорівнює нулю, тому на вихідний струм датчика 4 ... 20мА передача цифрової інформації впливу не надає. Такий режим використовується для настроювання датчиків.
Зв'язок протоколу HART здійснюється двома способами. У першому випадку, стандартному, двопровідної лінії можуть обмінюватися інформацією тільки два пристрої, при цьому вихідний аналоговий сигнал 4...20мА залежить від вимірюваної величини. Такий режим застосовується для настроювання польових пристроїв (датчиків).
У другому випадку до двопровідної лінії може бути підключено до 15 датчиків, кількість яких визначається параметрами лінії зв'язку та потужністю блоку живлення. Це режим багатоточкового зв'язку. У цьому режимі кожен датчик має свою адресу в діапазоні 1 ... 15, яким до нього звертається пристрій управління.
Датчик з адресою 0 від лінії зв'язку вимкнено. Обмін даними між датчиком та пристроєм керування в багатоточковому режимі здійснюється лише частотним сигналом. Струменевий сигнал датчика зафіксований на необхідному рівні і не змінюється.
Під даними у разі багатоточкового зв'язку маються на увазі не тільки результати вимірювань контрольованого параметра, але ще й цілий набір всілякої службової інформації.
Насамперед це адреси датчиків, команди управління, параметри налаштування. І вся ця інформація передається двопровідними лініями зв'язку. А чи не можна позбутися і їх? Щоправда, робити це треба обережно, лише у тих випадках, коли бездротове з'єднання не зможе вплинути на безпеку контрольованого процесу.
Виявляється, позбутися дротів можна. Вже в 2007 році був опублікований Стандарт WirelessHART, середовищем передачі є неліцензійна частота 2,4 ГГц, на якій працюють багато комп'ютерних бездротових пристроїв, у тому числі і бездротові локальні мережі. Тому і WirelessHART-пристрої можна використовувати без жодних обмежень. На малюнку 11 показано бездротову мережу WirelessHART.
Малюнок 11. Бездротова мережа WirelessHART
Ось такі технології прийшли на зміну старій аналоговій струмовій петлі. Але вона свої позиції не здає, широко застосовується скрізь, де це можливо.